4.2. САУ движением тележки мостового крана
Объект управления представляет собой мостовой кран, который при движении тележки крана массой переносит на подвесе длиной в горизонтальном направлении груз массой Тележка мостового крана приводится в движение электроприводом горизонтального перемещения. Груз, поднимаемый краном, раскачивается, когда кран начинает перемещение или останавливается. Задача состоит в выборе такого управления электродвигателем, которое обеспечивает горизонтальное перемещение груза за минимальное время, причем временем окончания переходного процесса является момент останова не тележки в конечной точке перемещения, а самого груза. Данная особенность динамики системы не позволяет достичь уменьшения времени перемещения груза только за счет увеличения скорости горизонтального движения тележки, потому что, остановившись в конечной точке своего движения, груз будет раскачиваться тем дольше, чем больше было начальное ускорение движения тележки. Требуется с помощью управления приводом горизонтального перемещения перенести груз из точки в точку за минимальное время. Причем, в целях безопасности желательно, чтобы в процессе движения груз колебался с как можно меньшей амплитудой (рис.4.7).
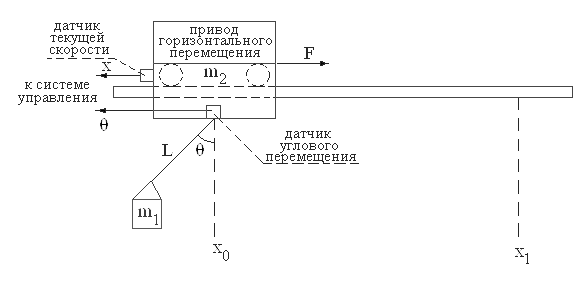
Рис.4.7. Схема мостового крана
Система уравнений, описывающих движение груза на подвеске тележки мостового крана, аналогична системе уравнений (4.1) с учетом изменения знака моменты силы тяжести в уравнении динамики вращательного движения и массы тележки в уравнении поступательного движения:
Структурная схема традиционной САУ движением тележки мостового крана, формирующая управление приводом горизонтального перемещения по сигналу ошибки позиционирования тележки в соответствии с ПД законом регулирования и выглядит следующим образом (рис.4.8). Для уменьшения колебаний груза при разгоне и торможении груза в системе управления иногда вводится отрицательная обратная связь по угловой скорости перемещения груза.
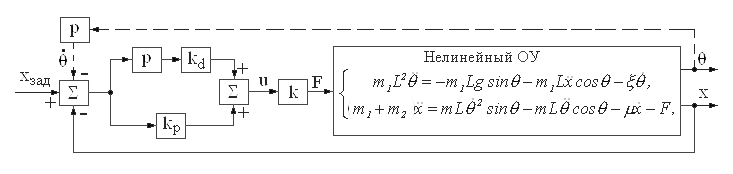
Рис.4.8.Структурная схема САУ движением тележки мостового крана
Моделирование динамики объекта управления с параметрами, , , , ,
,, , , показывает, что введение обратной связи по угловой скорости раскачивания груза хотя и уменьшает колебания подвеса, но не решает проблему увеличения скорости движения тележки (рис.4.9). Кроме того, динамика системы управления сильно зависит флуктуаций параметров объекта управления, например, от массы груза, что затрудняет выбор коэффициентов
ПД-регулятора, поскольку при фиксированных параметрах регулятора удовлетворительные результаты управления получаются только для определенного, достаточно малого диапазона масс транспортируемых грузов. Эту проблему может решить создание адаптивной системы управления движением тележки, но реализация такой системы сопряжена с большими временным и материальными затратами. Однако известно, что мостовым краном успешно управляет оператор, имеющий достаточный опыт работы. Поэтому, для управления движением тележки мостового крана можно использовать нечеткий регулятор [30], обобщающий накопленный человеком практический опыт.
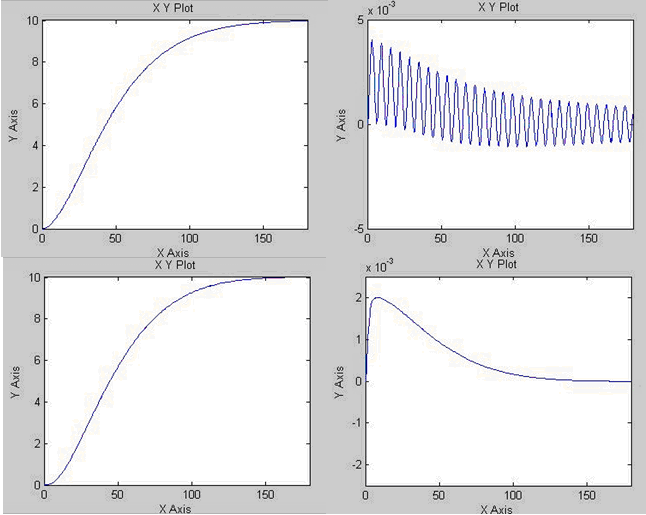
Рис.4.9. Динамика традиционной САУ движением тележки мостового крана без коррекции (вверху) и с коррекцией (внизу) по угловой скорости движения груза, слева – перемещение тележки x ; справа – угол отклонения подвеса груза от вертикали θ
Структурная схема нечеткой САУ движением тележки мостового крана выглядит следующим образом (рис.4.10). Нечеткий контроллер по трем входным сигналам θ, θ, x , соответствующим лингвистическим переменным «угол отклонения», «угловая скорость отклонения», «скорость тележки» производит нечеткий вывод выходного сигнала «приращение скорости тележки» и соответствующего ей сигнала ∆ν , который, в свою очередь корректируется сигналом обратной связи по положению тележки .
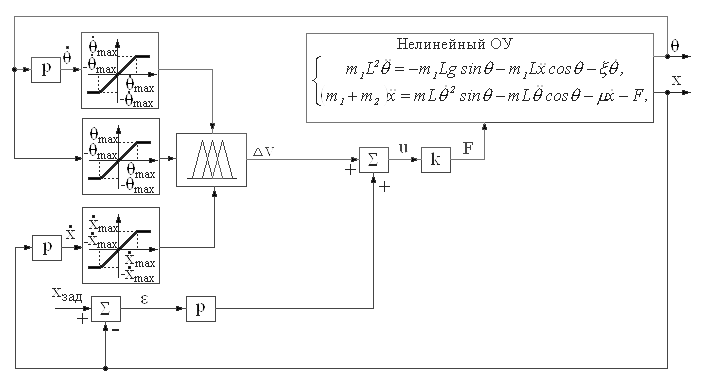
Рис.4.10.Структурная схема нечеткой САУ движением тележки мостового крана
ингвистическая переменная «угол отклонения», соответствующая входу нечеткого контроллера θ , по модулю ограничивается нелинейным элементом с насыщением и задается термами NМ-«отрицательный средний», NS-«отрицательный малый», Z-«нулевой», PS-«положительный малый», PM-«положительный средний» (рис.4.11(а)). Лингвистическая переменная «угловая скорость отклонения», соответствующая входу нечеткого контроллера , по модулю ограничивается нелинейным элементом с насыщением и задается термами N-«отрицательная», Z-«нулевая», P-«положительная (рис.4.11(б)). Лингвистическая переменная «скорость тележки», соответствующая входу нечеткого контроллера , по модулю ограничивается нелинейным элементом с насыщением и задается термами NМ-«отрицательная средняя», NS-«отрицательная малая», Z-«нулевая», PS-«положительная малая», PM-«положительная средняя» (рис.4.11(в)). Лингвистическая переменная «приращение скорости тележки», соответствующая выходу нечеткого контроллера ∆ν , по модулю ограничивается нелинейным элементом с насыщением и задается термами NМ-«отрицательное среднее», NS-«отрицательное малое», Z-«нулевое», PS-«положительное малое», PM-«положительное среднее» (рис.4.11(г)).
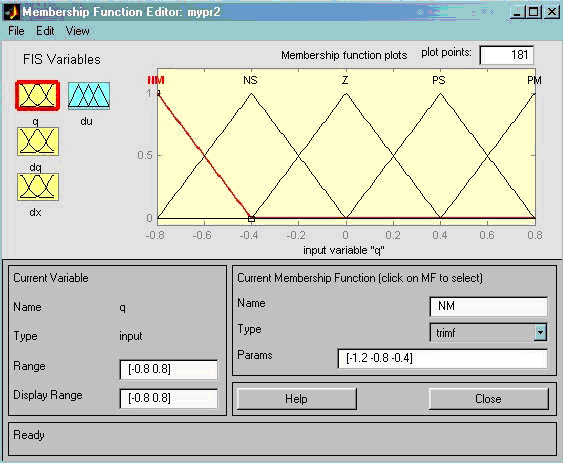
Рис.4.11(а).Функции принадлежностей лингвистических переменных, определяющих нечеткое представление выходного сигнала нечеткого контроллера
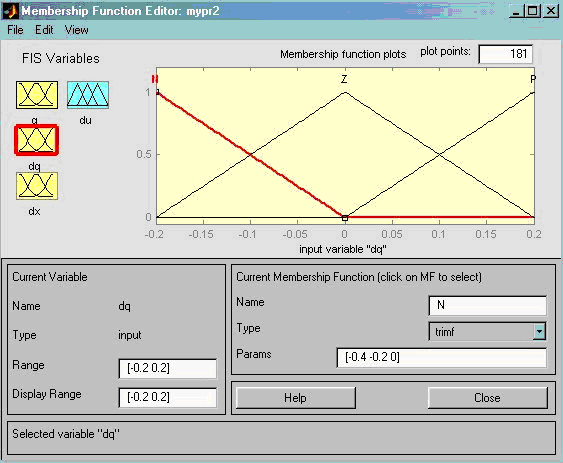
Рис.4.11(б).Функции принадлежностей лингвистических переменных, определяющих нечеткое представление выходного сигнала нечеткого контроллера
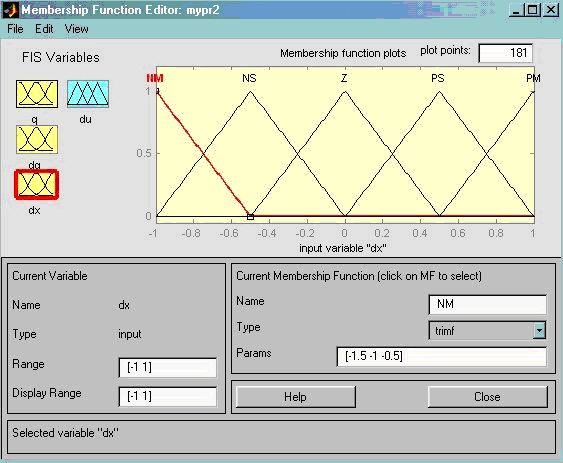
Рис.4.11(в).Функции принадлежностей лингвистических переменных, определяющих нечеткое представление выходного сигнала нечеткого контроллера
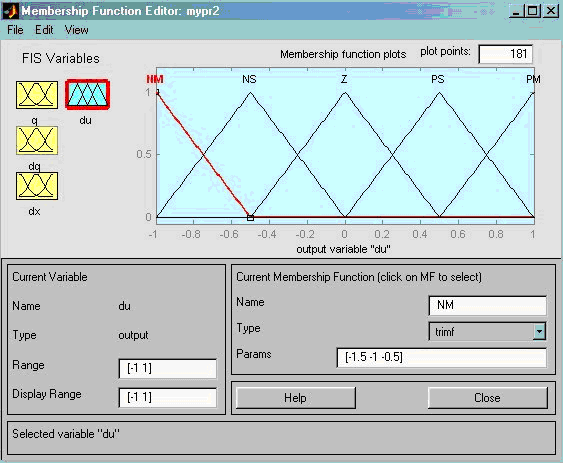
Рис.4.11(г).Функции принадлежностей лингвистических переменных, определяющих нечеткое представление выходного сигнала нечеткого контроллера
Лингвистические правила, которыми следует руководствоваться при выборе нечеткого значения коррекции скорости перемещения и которыми руководствуется машинист мостового крана при управлении механизмом выглядят следующим образом:
- ЕСЛИ «скорость тележки» «положительная малая» ТО «приращение скорости тележки» «положительное малое»;
- ЕСЛИ «скорость тележки» «положительная малая» ТО «приращение скорости тележки» «положительное малое»;
- ЕСЛИ «скорость тележки» «отрицательная малая» ТО «приращение скорости тележки» «отрицательное малое»;
- ЕСЛИ «скорость тележки» «отрицательная средняя» ТО «приращение скорости тележки» «отрицательное среднее»;
- ЕСЛИ «угол отклонения» «положительный средний» И «угловая скорость отклонения» «нулевая»ТО «приращение скорости тележки» «отрицательное среднее»;
- ЕСЛИ «угол отклонения» «отрицательный малый» И «угловая скорость отклонения» «отрицательная» И «скорость тележки» «нулевая» ТО «приращение скорости тележки» «нулевое»;
- ЕСЛИ «угол отклонения» «отрицательный малый» И «угловая скорость отклонения» «нулевая» И «скорость тележки» «нулевая» ТО «приращение скорости тележки» «отрицательное среднее»;
- ЕСЛИ «угол отклонения» «отрицательный малый» И «угловая скорость отклонения» «положительная» И «скорость тележки» «нулевая» ТО «приращение скорости тележки» «отрицательное малое»;
- ЕСЛИ «угол отклонения» «нулевой» И «угловая скорость отклонения» «отрицательная» И «скорость тележки» «нулевая» ТО «приращение скорости тележки» «положительное малое»;
- ЕСЛИ «угол отклонения» «нулевой» И «угловая скорость отклонения» «нулевая» И «скорость тележки» «нулевая» ТО «приращение скорости тележки» «нулевое»;
- ЕСЛИ «угол отклонения» «нулевой» И «угловая скорость отклонения» «положительная» И «скорость тележки» «нулевая» ТО «приращение скорости тележки» «отрицательное малое»;
- ЕСЛИ «угол отклонения» «положительный малый» И «угловая скорость отклонения» «отрицательная» И «скорость тележки»«нулевая» ТО «приращение скорости тележки» «положительное среднее».
Очевидно, что база нечетких правил определена не полностью на всем пространстве значений нечетких переменных, поэтому при программировании нечеткого контроллера соответствующая часть правил не вводится (рис.4.12).
Рис.4.12. База правил нечеткого контроллера
Проведем имитационное моделирование нечеткой САУ с контроллером Мамдани, задавшись теми же параметрами модели, что и в рассмотренном выше случае моделирования САУ с ПИД-регулятором (см. рис.4.13).
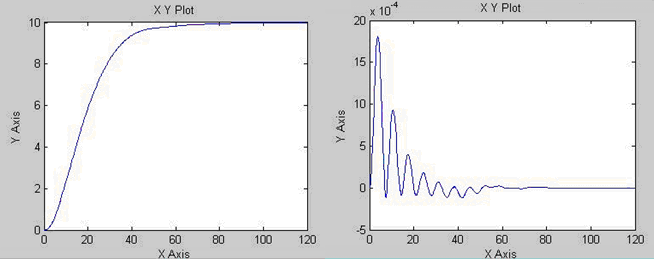
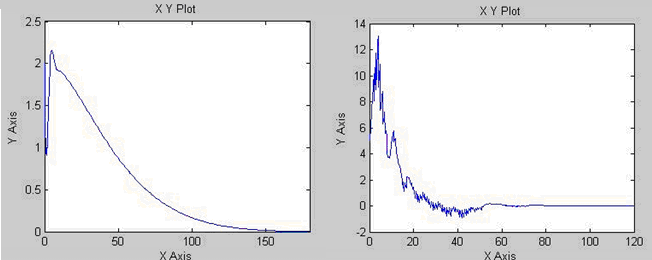
Рис.4.13. Динамика нечеткой САУ движением мостового крана слева – перемещение тележки x ; справа – угол отклонения подвеса груза от вертикали θ
Сравнительный анализ динамики работы нечеткой САУ и традиционной САУ с динамической коррекций по углу отклонения груза показывает, что применение нечеткого контроллера позволяет на треть увеличить быстродействие системы, сохранив при этом на прежнем уровне максимальное угловое отклонение груза. Однако, частота колебаний груза увеличилась. Это обусловлено тем, что нечеткий регулятор не допускает раскачивания груза при больших, по сравнению с работой традиционной САУ, ускорениях движения тележки за счет пульсирующего режима работы привода (см.рис.4.14). В нечеткой САУ привод работает в режиме переключений между большими и меньшими значениями развиваемой мощности, что позволяет с одной стороны уменьшить амплитуду колебаний груза, но с другой стороны при этом увеличивается частота колебаний груза.
РРис.4.14. Управление приводом перемещения тележки мостового крана; слева – традиционная САУ с ПИД-регулятором и коррекцией по θ ; справа – нечеткая САУ;
Таким образом, можно сказать, что нечеткая САУ ведет себя так же, как действовал бы при управлении человек: при движении многократно разгоняет и притормаживает груз в соответствии с анализом сложившейся ситуации и оценкой отк лонения груза от равновесия и расстояния тележки от целевой точки управления, т.е. при движении «поддергивает» груз вперед-назад в противофазе его колебаниям, чтобы не позволить ему слишком раскачаться. Традиционная САУ синтезирует управление по другому: сначала разгоняет груз, а затем, по мере приближения к целевой точке управления плавно тормозит его движение, что, как уже было сказано ранее, требует точного расчета регулятора при заранее известной массе груза.