3.3. Адаптивные нечеткие САУ
Рассмотренные ранее САУ с нечетким контроллером и гибридные нечеткие САУ способны обеспечить стабильное управление сложным объектом только в случае если структура и параметры управляемого объекта остаются достаточно стабильными. Для сохранения заданного качества процесса управления объектом, структура и параметры которого претерпевают существенные изменения, необходимо производить адаптацию управления. САУ с нечетким контроллером не обладают подобными адаптационными возможностями. Их способность управлять объектом с неизвестной структурой обусловлена тем, что закон управления задается в нечеткой размытой форме с помощью лингвистических терминов, что позволяет реализовать управление при нечетко определенной модели управляемого объекта. Однако, в случае кардинального изменения характера поведения объекта управления нечеткие правила управления могут стать неприемлемыми во вновь сложившихся условиях функционирования системы. Частично эту проблему решают гибридные нечеткие САУ, в которых реализована нечеткая адаптация параметров закона управления. Однако адаптационные способности гибридных нечетких САУ ограничены возможностями традиционного регулятора исполнительного уровня. Наиболее полно приспосабливаться к изменяющимся свойствам объекта управления способны адаптивные нечеткие САУ, в которых реализована интеллектуальная адаптация, но не параметров управления, как в гибридных нечетких САУ, а поведения системы , т.е. нечеткая лингвистическая адаптация нечетких правил, описывающих поведение системы в тех же терминах естественного языка.
Адаптивная нечеткая САУ представляет собой двухуровневую систему с нечетким контроллером на ведомом исполнительном уровне и нечетким блоком адаптации на ведущем координационном уровне (рис.3.14). Принцип работы адаптивного нечеткого контроллера, объединяющего в своем составе координационный и исполнительный уровни управления, заключается в следующем. При существенном изменении поведения объекта в текущей ситуации, характеризующейся различиями между реальным и желаемы состоянием объекта управления, система нечеткого вывода контроллера исполнительного уровня продуцирует управление, реализация которого уже не обеспечивает необходимого качества регулирования. В этом случае блок адаптации координационного уровня, пользуясь собственной системой нечеткого вывода, производит коррекцию продукционных правил нечеткого контроллера исполнительного уровня. Непосредственное изменение базы правил нечеткого контроллера исполнительного уровня осуществляет корректор базы правил. Как правило, лингвистической коррекции подвергаются те продукционные правила, активизация которых привела к неадекватному управлению, с точки зрения лингвистической оценки управления, содержащейся в базе знаний координационного уровня. Таким образом, на координационном уровне происходит нечеткая оценка управления и, при необходимости, коррекция базы продукционных правил нечеткого контроллера, т.е. фактически производится интеллектуальная оценка и коррекция поведения системы управления, которое определяется в виде нечетких продукций на исполнительном уровне (рис.3.14).
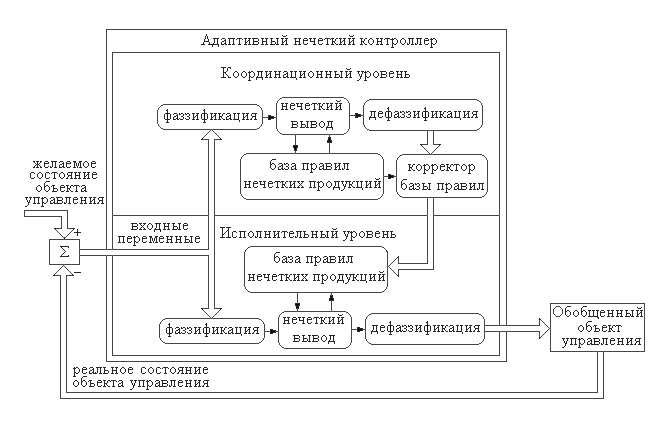
Рис.3.14. Архитектура адаптивной нечеткой САУ
Входные переменные, характеризующие различия между реальным и желаемым состоянием объекта управления, подвергаются фаззификации и используются и при непосредственном формировании управления в нечетком контроллере на исполнительном уровне, и в системе нечеткого вывода сигнала адаптации координационного уровня. Система нечеткого вывода координационного уровня содержит базу нечетких продукционных правил обобщенного вида «ЕСЛИ «отклонение от желаемого состояния объекта» ТО «изменение базы правил исполнительного уровня», в которой в нечеткой форме представлены знания экспертов по корректировке базы правил системы нечеткого вывода исполнительного уровня с целью обеспечения наилучшего, с точки зрения эксперта, движения объекта. Система нечеткого вывода исполнительного уровня содержит базу нечетких продукционных правил обобщенного вида «ЕСЛИ «отклонение от желаемого состояния объекта» ТО «воздействие на объект», в которой в нечеткой форме представлены знания экспертов по управлению данным технологическим процессом при движении к желаемому состоянию объекта Наиболее проблематичным в подобной системе является разработка алгоритма работы корректора базы правил координационного уровня, поскольку не существует единого метода адаптации системы нечеткого вывода исполнительного уровня, и в каждой реально введенной в эксплуатацию адаптивной нечеткой САУ этот вопрос решается индивидуально.
Пример. Рассмотрим нечеткое управление динамическим объектом (рис.3.15) при помощи адаптивного нечеткого контроллера, синтезирующего воздействие u на объект управления посредством системы нечеткого вывода с базой продукционных правил, представленных в таблице 3.3. Управление осуществляется по двум переменным: отклонению e и скорости изменения отклонения действительного значения y от желаемого значения выходной переменной объекта управления. База правил системы нечеткого вывода исполнительного уровня построена в виде упорядоченного согласованного списка нечетких продукционных правил в виде «IF AND THEN », что позволяет реализовать нечеткий вывод согласно алгоритму Сугено.
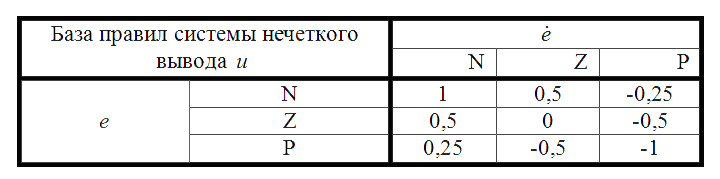
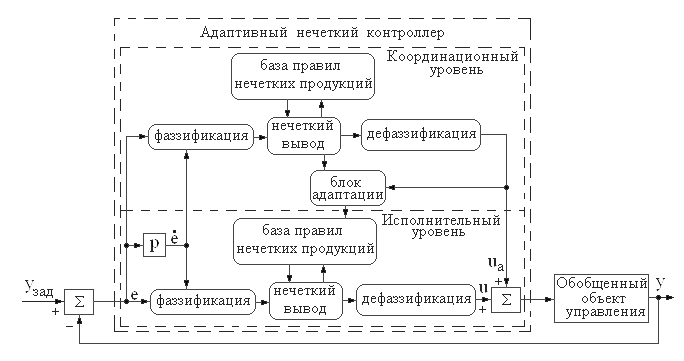
Рис.3.15. Пример построения адаптивной интеллектуальной САУ
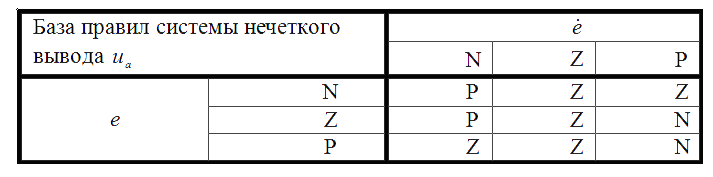
На координационном уровне в соответствии с базой продукционных правил, представленных в таблице 3.4, происходит нечеткий вывод корректирующего сигнала . На каждом шаге формирования управления блок адаптации изменяет консеквенты прошедших активизацию продукционных правил нечеткого контроллера исполнительного уровня.
Формализация описания отклонения e , скорости изменения отклонения выхода объекта управления от требуемого значения, а также адаптации управляющего воздействия , проведена при помощи лингвистических переменных, функции принадлежности которых представлены на рис.3.16 (а, б).
Если объект управления описывается передаточной функцией , нечеткий контроллер исполнительного уровня реализует алгоритм нечеткого вывода Сугено в соответствии с таблицей 3.3, а на координационном уровне используется адаптивный алгоритм нечеткой коррекции базы правил по алгоритму Мамдани в соответствии с таблицей 3.4, то путем моделирования динамики системы можно получить переходные процессы в рассматриваемой адаптивной нечеткой САУ (рис.3.17).
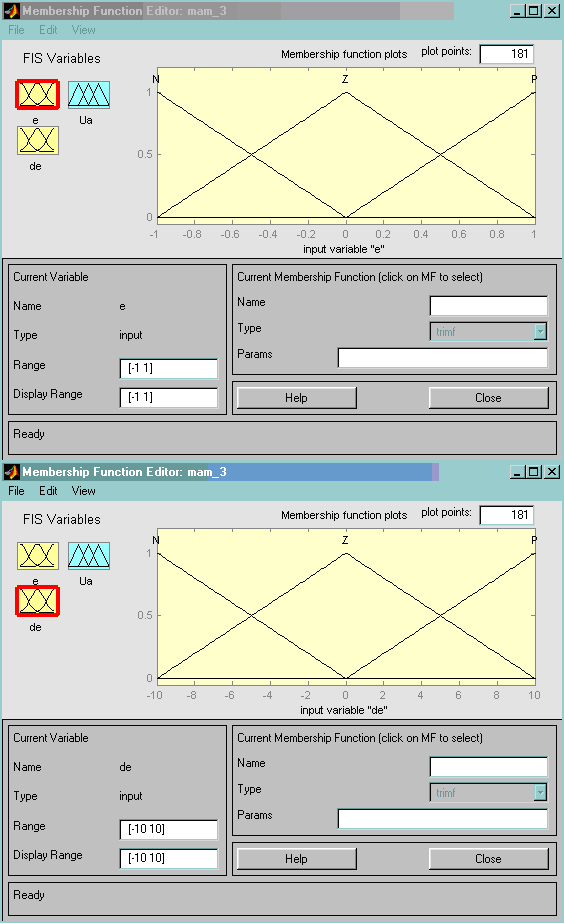
Рис.3.16(а). Функции принадлежностей кортежей лингвистических переменных, определяющих нечеткое представление e , ,
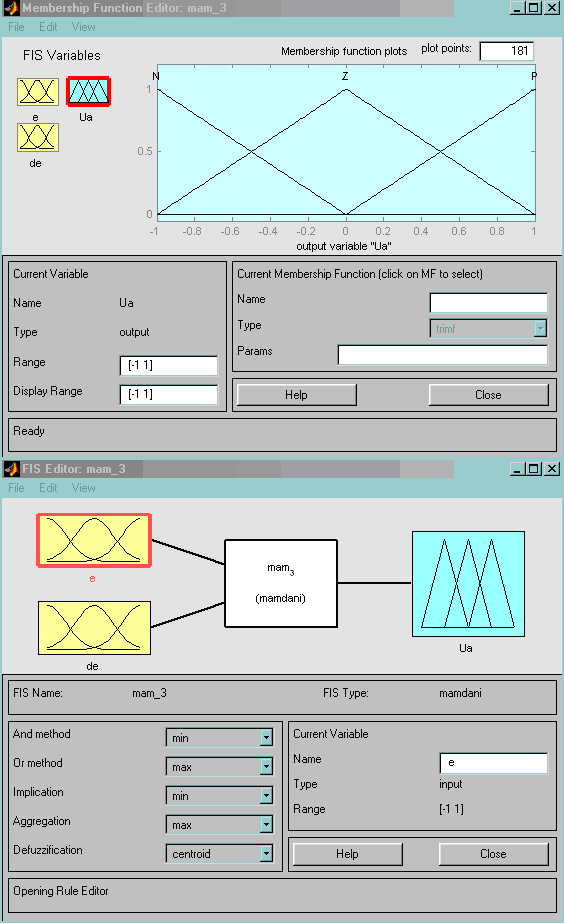
Рис.3.16(б). Функции принадлежностей кортежей лингвистических переменных, определяющих нечеткое представление e , ,
На рис.3.17 представлены переходные процессы при нечетком регулировании с фиксированной базой правил, т.е. с отключенным координационным уровнем без адаптации базы правил, что соответствует архитектуре САУ с обычным нечетким контроллером. При одних и тех же показателях перерегулирования и быстродействия переходный процесс в адаптивной нечеткой САУ имеет СКО на 15% меньше, чем в САУ с обычным нечетким контроллером, что соответствует работе системы, представленной на рис.3.15 с отключенным блоком адаптации.
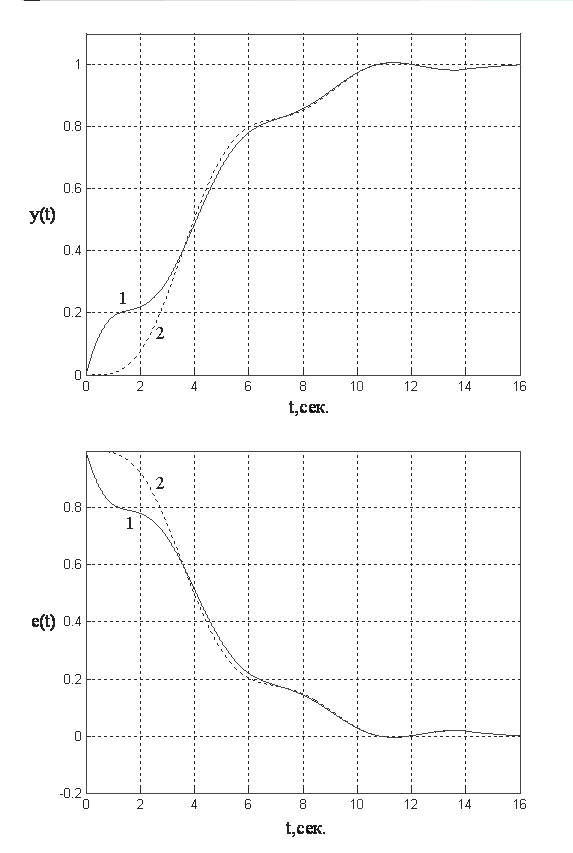
Рис.3.17.Динамика САУ с адаптацией(1) и без адаптации(2) базы правил
Как уже было отмечено выше, основная проблема при построении адаптивных нечетких САУ заключается в отсутствии целостной методики по выбору конкретного способа адаптации базы продукционных правил нечеткого контроллера исполнительного уровня.
Допустим, если в рассмотренном выше примере в нечетком контроллере реализуется алгоритм вывода Мамдани, а консеквенты продукционных правил системы нечеткого вывода исполнительного уровня соответствуют нечетким числам, то блок адаптации может производить нечеткое сложение фигурирующих в заключениях прошедших активизацию продукционных правил нечетких чисел, соответствующих лингвистической оценке управления u , и нечеткого числа с модой . Либо алгоритм работы блока адаптации можно построить исключительно на работе с лингвистическими понятиями, т.е. производить обратную фаззификацию и полученное нечеткое значение «отрицательная средняя адаптация», «положительная малая адаптация» и т.п. при помощи лингвистических связок использовать для коррекции консеквентов прошедших активизацию продукционных правил. Допустим, если для какого то из активизированных правил управление «положительное малое», а оценка результата управления, полученного в соответствии с активизацией этого правила, и соответствующая адаптация «отрицательная средняя», то изменить в данном правиле консеквент, поскольку «положительное малое»+«отрицательное среднее»=«отрицательное близкое к нулю».
Уже исходя из рассмотренного примера, становится ясно, что можно предложить большое число вариантов построения адаптивных нечетких САУ, использующих и для управления, и для адаптации методы теории нечетких множеств. Если же не ограничиваться только теорией нечетких множеств, а рассматривать возможность применения для адаптации на координационном уровне всей совокупности методов искусственного интеллекта, то количество потенциально возможных вариантов и схем построения адаптивных нечетких САУ возрастает многократно.