3.2. Гибридные нечеткие САУ
Гибридная нечеткая САУ – это иерархическая двухуровневая система автоматического управления, на нижнем исполнительном уровне которой находится традиционный регулятор, построенный в соответствии с методами классической теории автоматического управления, а на верхнем координационном уровне используется система нечеткого вывода для интеллектуальной коррекции параметров закона управления, реализованного на исполнительном уровне (рис.3.9.)
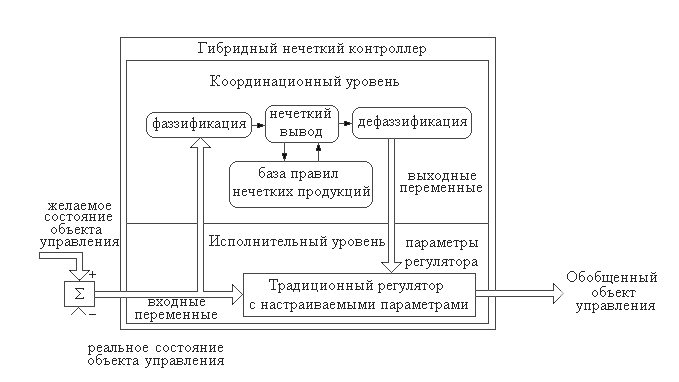
Рис.3.9. Архитектура гибридной нечеткой САУ
Входные переменные, характеризующие различия между реальным и желаемым состоянием объекта управления, подвергаются фаззификации и используются и при непосредственном формировании управления на исполнительном уровне, и в системе нечеткого вывода координационного уровня. Система нечеткого вывода координационного уровня содержит базу нечетких продукционных правил обобщенного вида ЕСЛИ «отклонение от желаемого состояния объекта» ТО «изменение параметров закона управления исполнительного уровня», в которой в нечеткой форме представлены знания экспертов по корректировке параметров регулятора исполнительного уровня с целью обеспечения наилучшего, с точки зрения эксперта, движения объекта. В большинстве случаев при практической реализации гибридных контроллеров в качестве традиционного регулятора исполнительного уровня используется ПИД-регулятор, как обладающий одновременно удовлетворительными динамическими характеристиками при управлении различными классами объектов и возможностью легкой перенастройки параметров.
Пример. Рассмотрим нечеткое управление динамическим объектом (рис.3.10) при помощи гибридного нечеткого контроллера, синтезирующего на исполнительном уровне воздействие u на объект управления посредством ПИД-регулятора с коэффициентами усиления пропорциональной, дифференциальной и интегральной составляющих , и соответственно.
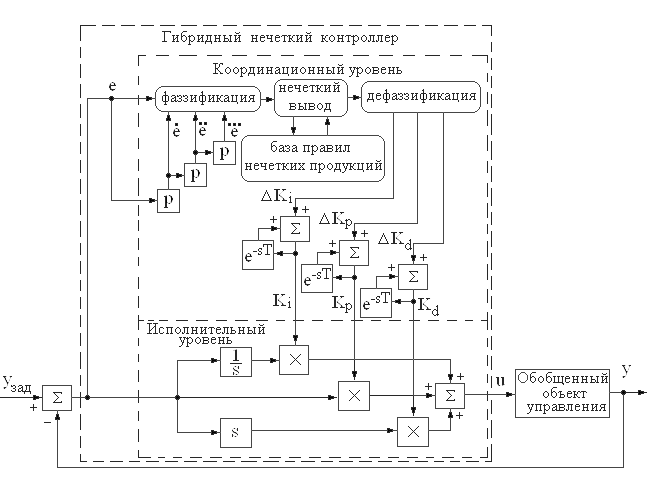
Рис.3.10. Пример построения гибридной нечеткой САУ
На координационном уровне при помощи системы нечеткого вывода с базой продукционных правил, представленных в таблице 3.2, на основе информации об отклонении желаемой выходной переменной объекта управления от ее действительного значения y с интервалом времени T происходит интеллектуальная коррекция настроек ПИД-регулятора и выработка поправок его параметров , и соответственно.
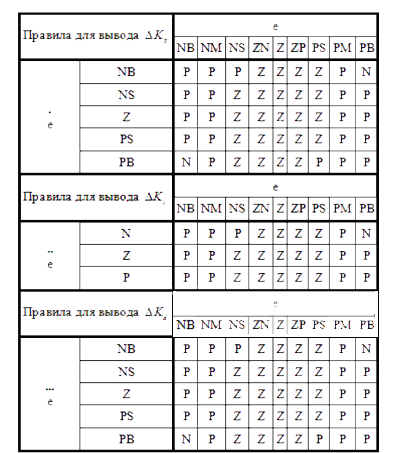
Формализация описания показателей отклонения e , , , выхода объекта управления от требуемого значения, а также управляющего воздействия u , проведена при помощи лингвистических переменных, в кортеже которых содержатся нечеткие переменные, соответствующих понятиям отрицательного малого NS, отрицательного среднего NM, отрицательного большого NB, отрицательного близкого к нулю ZN, приблизительно нулевого Z, положительного близкого к нулю ZP, положительного малого PS, положительного среднего PM, положительного большого PB, отрицательного N, положительного P значений соответствующих физических величин, функции принадлежности которых представлены на рис.3.11(а, б, в).
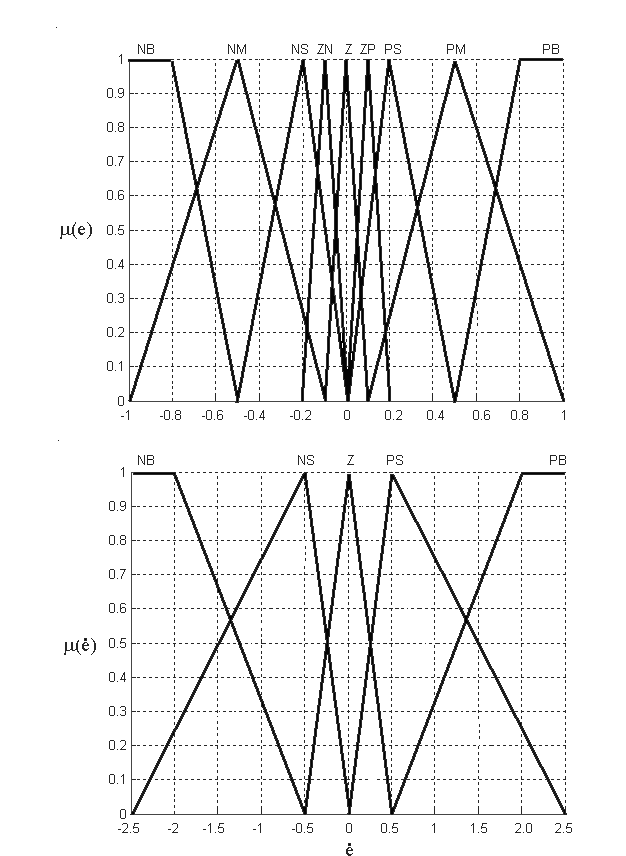
Рис.3.11(а). Функции принадлежностей кортежей лингвистических переменных, определяющих нечеткое представление входных и выходных величин, использующихся при реализации алгоритма нечеткого вывода Мамдани
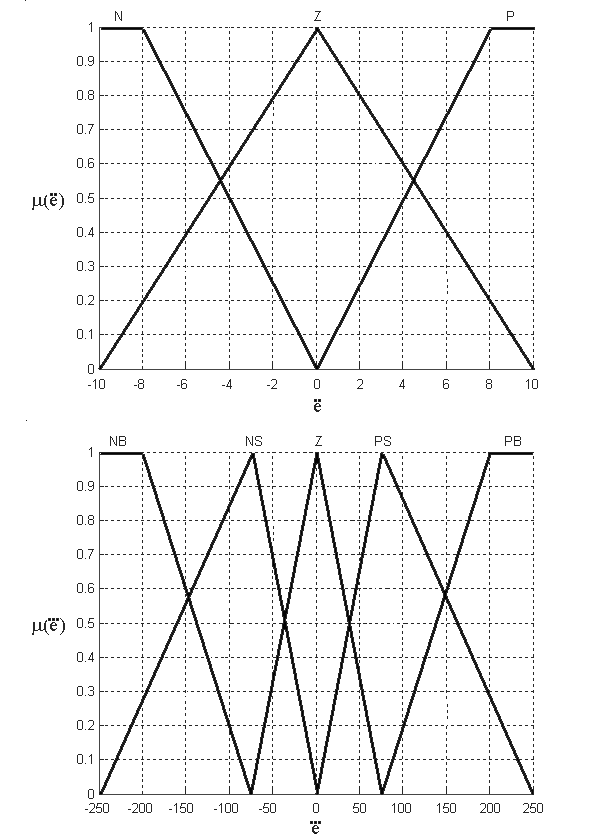
Рис.3.11(б). Функции принадлежностей кортежей лингвистических переменных, определяющих нечеткое представление входных и выходных величин, использующихся при реализации алгоритма нечеткого вывода Мамдани
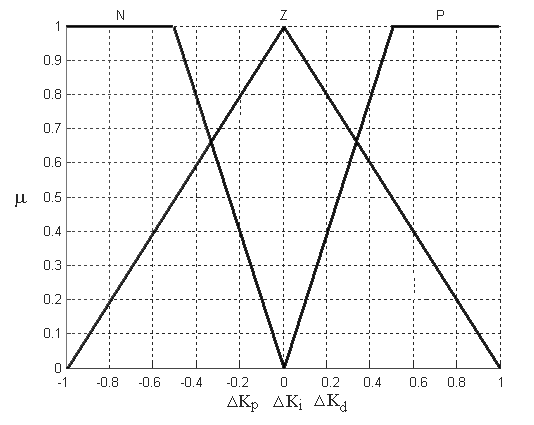
Рис.3.11(в). Функции принадлежностей кортежей лингвистических переменных, определяющих нечеткое представление входных и выходных величин, использующихся при реализации алгоритма нечеткого вывода Мамдани
Если объект управления описывается передаточной функцией , то путем моделирования динамики системы можно получить переходные процессы в САУ по выходу y(t) и по ошибке при нечетком управлении с использованием нечеткого вывода на рассмотренной базе правил согласно алгоритму Мамдани (рис.3.12). На том же рисунке представлены переходные процессы при
Сравнительный анализ переходных процессов показывает, что использование гибридного нечеткого контроллера предпочтительнее применения обычного ПИД-регулятора. Если проанализировать графики изменения коэффициентов ПИД-регулятора исполнительного уровня гибридной нечеткой САУ (рис.3.13), то становится понятным, за счет чего происходит улучшение динамических характеристик системы при введении в ее состав гибридного нечеткого контроллера.
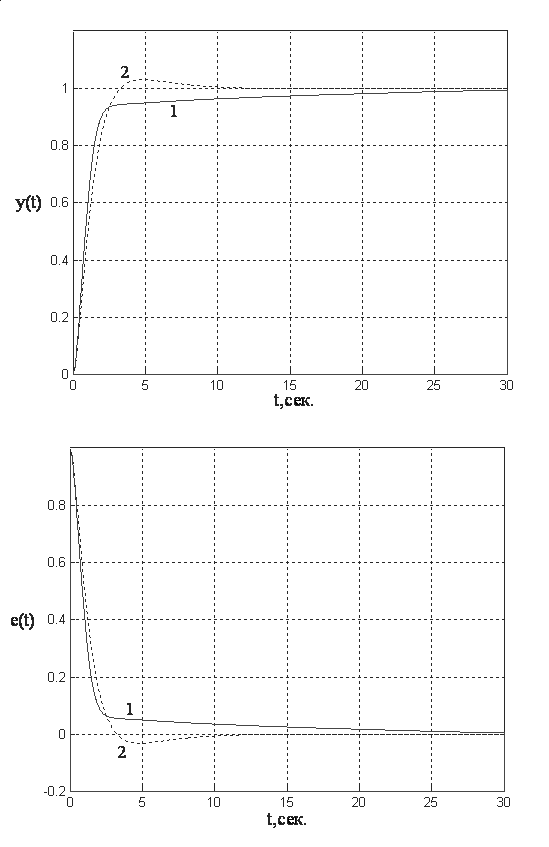
Рис.3.12. Переходные процессы в САУ при нечетком(1) и ПИД(2) регулировании
Параметры регулятора перестраиваются в соответствии с переменными, характеризующими динамику поведения отклонения выходной координаты объекта от требуемого значения: при больших значениях ошибки и тенденциях к ее увеличению параметры ПИД-регулятора увеличиваются, при снижении производных характеризующих рост ошибки или при уменьшении самой ошибки параметры ПИД-регулятора соответственно уменьшаются. При больших значениях ошибки происходит так называемый «разгон» переходного процесса, а при постепенном приближении значения выходной переменной системы к требуемому значению – «торможение» переходного процесса, что обеспечивает практически такое же быстродействие для нечеткой САУ при отсутствии перерегулирования.
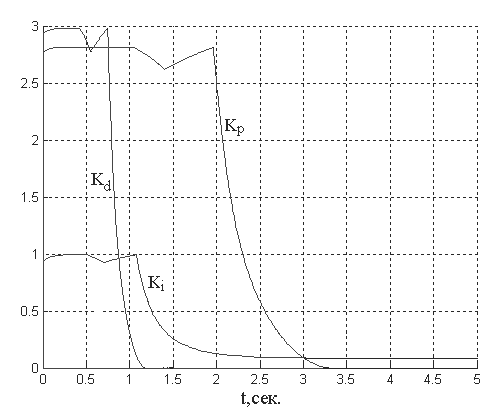
Рис. 3.13. Процесс интеллектуальной подстройки параметров ПИД-регулятора (начальные значения параметров соответствуют рассчитанным по минимаксному критерию)
Таким образом, в гибридных нечетких САУ на координационном уровне реализуется интеллектуальная подстройка параметров регулятора, функционирующего на исполнительном уровне, что дает возможность повысить эффективность и расширить диапазон применения традиционных регуляторов. С точки зрения классической ТАУ, такую структуру можно отнести к классу адаптивных систем]. Однако, если исходить из терминологии интеллектуальных САУ, гибридные нечеткие САУ не являются адаптивными в смысле сообщения системе человеческих адаптационных свойств, т.е. не являются интеллектуальными в большом согласно принципов IPDI. В гибридных нечетких САУ происходит процесс адаптации управления, а не процесс адаптации поведения, т.е. степень приспособляемости системы жестко ограничена рамками, определенными на исполнительном уровне структурой реализуемого закона управления. Следующим шагом на пути повышения степени интеллектуальности системы является переход от гибридных систем с адаптивным нечетким системам, в которых реализуется стратегия адаптации поведения, т.е. происходит интеллектуальная коррекция структуры управления, а не только его параметров.