3.1. САУ с нечетким контроллером
При синтезе САУ с нечетким контроллером основная доля работы приходится на конструирование базы нечетких продукционных правил. Нечеткий контроллер реализует управление по состоянию, если продукции базы правил строятся с использованием лингвистических переменных, характеризующих состояние объекта. В этом случае цель управления в виде желаемого состояния объекта управления неявно вводится в базу правил экспертом на стадии формирования базы нечетких продукционных правил. Архитектура САУ с нечетким контроллером, реализующей управление по состоянию, выглядит следующим образом (рис.3.1).
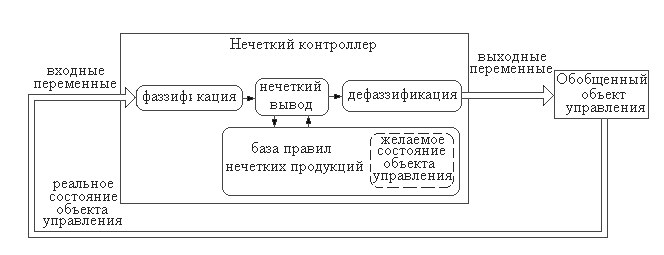
Рис.3.1. САУ с нечетким контроллером и управлением по состоянию
Обобщенный объект управления включает в себя непосредственно управляемый технологический процесс, усилительно преобразующие механизмы, органы регулирования и датчики измерения переменных состояния объекта управления. Входные переменные, характеризующие реальное и желаемое состояния объекта управления, подвергаются фаззификации и используются в системе нечеткого вывода. Система нечеткого вывода содержит базу нечетких продукционных правил обобщенного вида ЕСЛИ «состояние объекта» ТО «воздействие на объект», в которой в нечеткой форме представлены знания экспертов по управлению данным технологическим процессом при движении к желаемому состоянию объекта на основе знаний о величинах, характеризующих действительное состояние объекта. В результате нечеткого вывода и последующей дефаззификации получаются четкие значения выходных переменных, которые используются для последующего управления технологическим процессом.
Пример. В смеситель подается холодная и горячая вода по двум трубопроводам с расходом и температурой , и , соответственно. Регулировка температуры воды t на выходе из смесителя достигается путем изменения расхода горячей воды на входе смесителя. Рассмотрим нечеткое управление обобщенным динамическим объектом, включающим в себя регулируемый вентиль с коэффициентом передачи , смеситель и датчик температуры с передаточной функцией (рис.3.2), при помощи нечеткого контроллера, синтезирующего воздействие u , эквивалентное углу поворота вентиля крана горячей воды, исходя из оценки комфортности температуры воды на выходе смесителя.
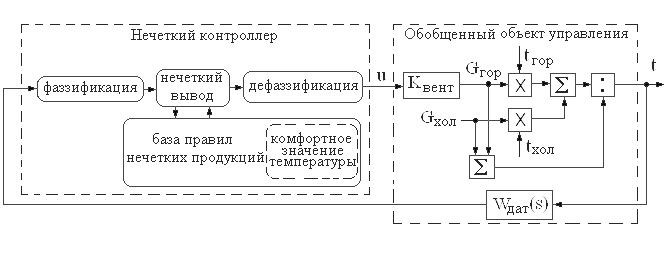
Рис.3.2. Пример построения интеллектуальной САУ с нечетким контроллером, реализующим управление по состоянию
Эвристические правила, применяющиеся при регулировании температуры воды на выходе смесителя посредством поворота вентиля вправо/влево относительно среднего положения, соответствующего комфортной температуре воды на выходе смесителя:
- ЕСЛИ «вода горячая» ТО «повернуть вентиль на большой угол вправо»;
- ЕСЛИ «вода не очень горячая» ТО «повернуть вентиль на небольшой угол вправо»;
- ЕСЛИ «вода теплая» ТО «не менять положения вентиля»;
- ЕСЛИ «вода прохладная» ТО «повернуть вентиль на небольшой угол влево»;
- ЕСЛИ «вода холодная» ТО «повернуть вентиль на большой угол влево».
Формализация описания температуры воды на выходе из смесителя и угла поворота вентиля крана горячей воды проведена при помощи лингвистических переменных, в кортеже которых содержится по пять нечетких переменных, функции принадлежности которых представлены на рис.3.3.
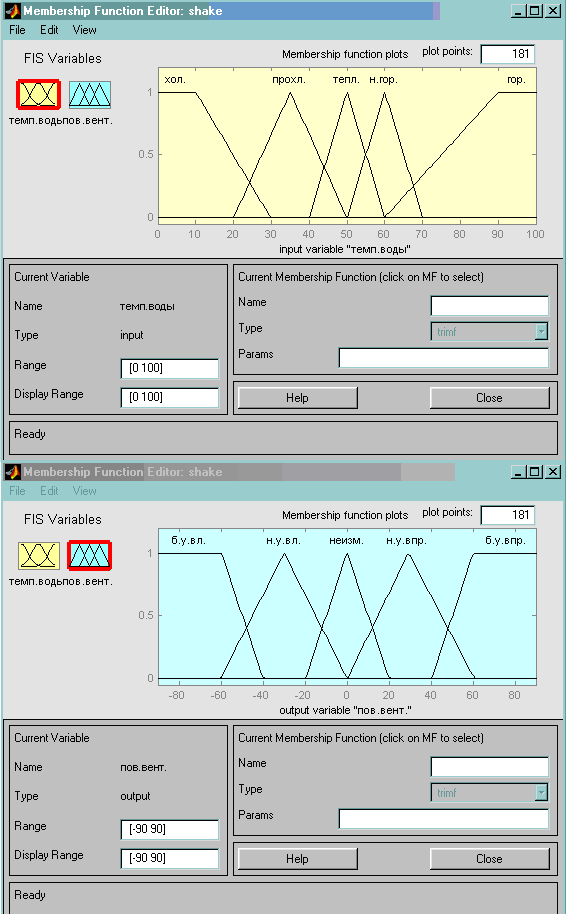
Рис.3.3. Функции принадлежностей кортежей лингвистических переменных, определяющих нечеткое представление входных и выходных величин, использующихся при реализации алгоритма нечеткого вывода Мамдани
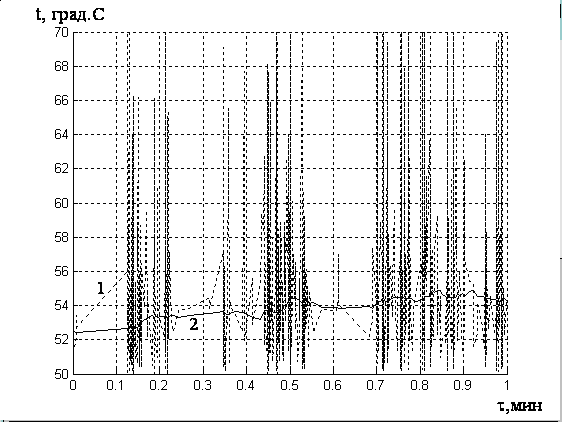
Рис.3.4. Динамика объекта управления при разомкнутом управлении (1) и при управлении по состоянию с помощью нечеткого контроллера Мамдани (2)
Если произвести имитационное моделирование объекта управления при нормально распределенной с математическим ожиданием и дисперсией , нормально распределенным с математическим ожиданием и дисперсией , нормально распределенной с математическим ожиданием и дисперсией , , , то можно получить реализацию динамики процесса стабилизации комфортной температуры воды на выходе из смесителя при нечетком управлении в САУ с использованием нечеткого вывода на рассмотренной базе правил согласно алгоритма Мамдани (рис.3.4).
Нечеткий контроллер реализует управление по отклонению, если продукции базы правил строятся с использованием лингвистических переменных, характеризующих отклонение реального и желаемого состояний объекта. В этом случае цель управления в виде желаемого состояния объекта управления явно вводится в систему управления при помощи задающего устройства. Архитектура САУ с нечетким контроллером, реализующей управление по отклонению, выглядит следующим образом (рис.3.5).
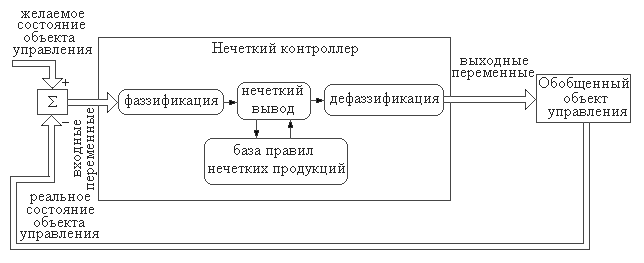
Рис.3.5. САУ с нечетким контроллером и управлением по отклонению
Входные переменные, характеризующие различия между реальным и желаемым состоянием объекта управления, подвергаются фаззификации и используются в системе нечеткого вывода. Система нечеткого вывода содержит базу нечетких продукционных правил обобщенного вида ЕСЛИ «отклонение от желаемого состояния объекта» ТО «воздействие на объект», в которой в нечеткой форме представлены знания экспертов по управлению данным технологическим процессом при движении к желаемому состоянию объекта на основе знаний о величинах, характеризующих отклонение объекта от желаемого состояния.
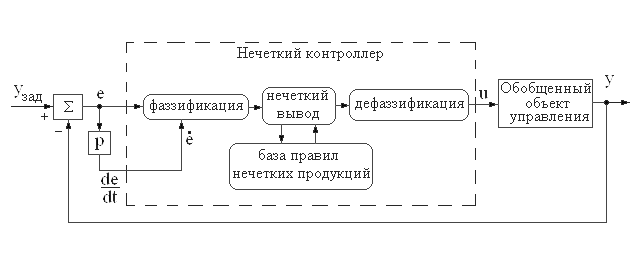
Рис.3.6. Пример построения интеллектуальной САУ с нечетким контроллером, реализующим управление по отклонению
Пример. Рассмотрим нечеткое управление динамическим объектом (рис.3.6) при помощи нечеткого контроллера, синтезирующего воздействие на объект управления посредством системы нечеткого вывода с базой продукционных правил, представленных в таблице 3.1. Управление осуществляется по двум переменным: отклонению e и скорости изменения отклонения желаемой выходной переменной объекта управления от ее действительного значения y .
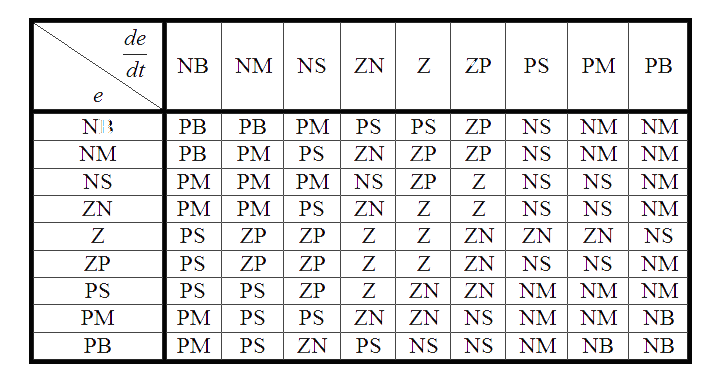
Формализация описания отклонения и скорости изменения отклонения выхода объекта управления от требуемого значения, а также управляющего воздействия, проведена при помощи лингвистических переменных, в кортеже которых содержится по девять нечетких переменных, соответствующих понятиям отрицательного малого NS, отрицательного среднего NM, отрицательного большого NB, отрицательного близкого к нулю ZN, приблизительно нулевого Z, положительного близкого к нулю ZP, положительного малого PS, положительного среднего PM, положительного большого PB значений соответствующих физических величин, функции принадлежности которых представлены на рис.3.7(a,б).
Если обобщенный объект управления представить в виде последовательного соединения двух апериодических звеньев с коэффициентом усиления K и постоянными времени , , являющимися непрерывными случайными величинами, распределенными нормально с математическим ожиданием , , и дисперсией , , соответственно, то можно получить переходный процесс в САУ при нечетком управлении с использованием нечеткого вывода на рассмотренной базе правил согласно алгоритму Мамдани (рис.3.8).
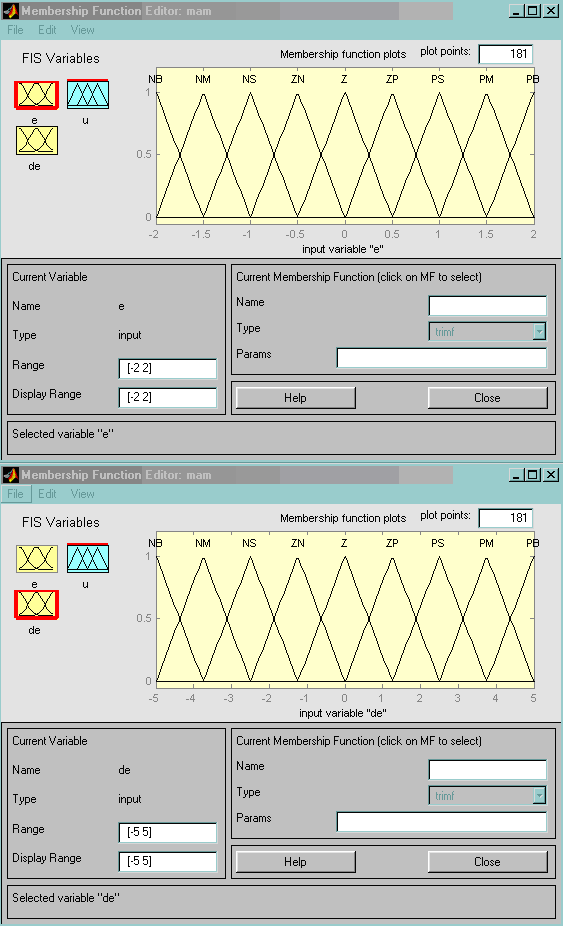
Рис.3.7(а). Функции принадлежностей кортежей лингвистических переменных, определяющих нечеткое представление входных и выходных величин, использующихся при реализации алгоритма нечеткого вывода Мамдани)
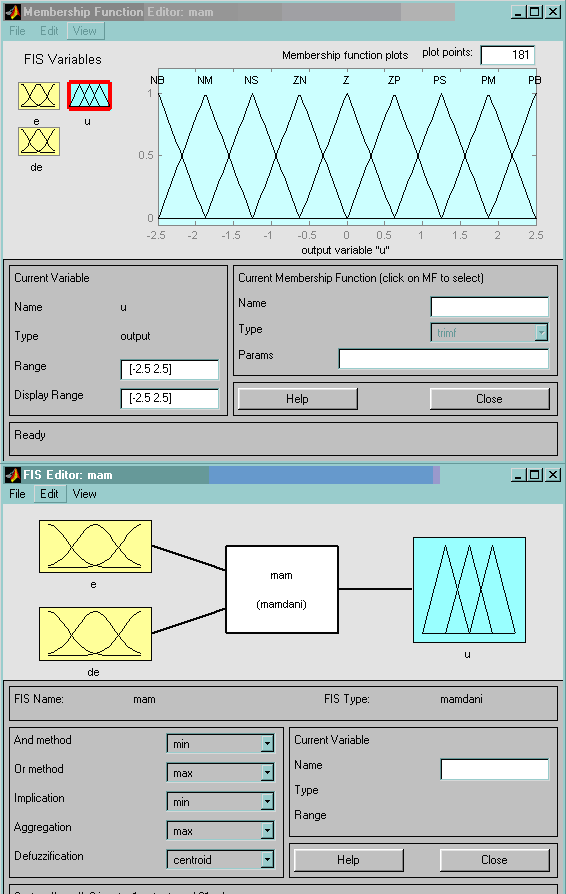
Рис.3.7(б). Функции принадлежностей кортежей лингвистических переменных, определяющих нечеткое представление входных и выходных величин, использующихся при реализации алгоритма нечеткого вывода Мамдани
На рис.3.8 для сравнения представлен переходный процесс при альтернативном ПИД-регулировании с параметрами регулятора, рассчитанными по минимаксному критерию исходя из математических ожиданий постоянных времени объекта управления. Несмотря на то, что рассмотренное в данном примере представление сложного слабоструктурированного объекта посредством апериодических звеньев с нестационарными постоянными времени весьма отдаленно напоминает реальную сложную систему, анализ полученных переходных характеристик позволяет сделать вывод об устойчивости рассматриваемого нечеткого управления, а также как о его недостатках в виде больших инерционности и перерегулирования, так и о его преимуществах с точки зрения минимизации СКО при стабилизации стационарного режима объекта управления, по сравнению с традиционным ПИД-регулятором.
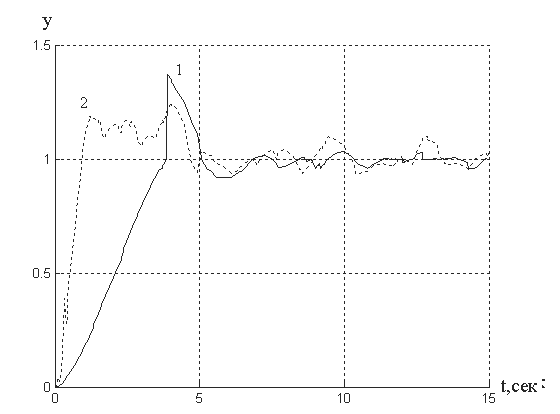
Рис.3.8. Переходные процессы в сложной САУ с контроллером Мамдани (1) и с ПИД-регулятором (2)
Таким образом, динамика САУ с нечетким контроллером всецело определяется архитектурой системы нечеткого вывода: методом построения и содержанием базы продукционных правил, а также способом реализации алгоритма нечеткого вывода. Поэтому при проектировании рассмотренного типа САУ с особой тщательностью необходимо подходить к выбору экспертов, методикам экспертного опроса и формированию базы правил. Что касается выбора способов реализации отдельных этапов алгоритма нечеткого вывода, то, как уже было отмечено ранее, этот вопрос в настоящее время решается в большей степени интуитивно, поскольку пока не существует законченной и целостной методики синтеза алгоритма нечеткого вывода на базе продукционных правил, позволяющего реализовать нечеткое управление в соответствии с заданной заранее какой либо оценкой требуемого качества данного управления. Как правило выбор конкретного алгоритма нечеткого вывода осуществляется из ограниченного числа их возможных реализаций эмпирическим путем. Вопрос аналитического конструирования нечеткого контроллера, реализующего нечеткое управление объектом «наилучшим» (в смысле какого либо критерия) образом на данный момент остается открытым.